
Сельское хозяйство давно стало одним из наиболее интересных и продуктивных направлений применения информационных технологий. Но при этом направлением не очень заметным за пределами сферы непосредственно профессионального интереса. Эта незаметность, конечно, вполне объяснима. Потому что рассматривать сгенерированные искусственными интеллектом картинки и читать соответствующие тексты интересно, а в полях обычно происходит скучное. Картошка растет. Или чай.
Однако, как вы прекрасно понимаете, картошка и чай важнее сгенерированных картинок. Да и IT-движуха там идет не менее интересная. В чае, по меньшей мере — за картошкой я не слежу. Но это не от высокомерного отношения к картошке, конечно. Просто за всем не уследишь.
Так вот. Месяца не проходит, чтобы в новостную ленту не попал анонс какой-либо статьи об очередной оптимизации каких-либо алгоритмов, применяемых или потенциально применимых в чайной индустрии. Иногда эти алгоритмы совсем просты и не особенно специфичны — к таким алгоритмам можно отнести маршруты наиболее эффективного облета дронами чайных плантаций. Иногда это специальные и исключительно чайные алгоритмы. Например, алгоритмы распознавания пригодных для сбора чайных почек и листьев. Замечу, кстати, что эффективность таких алгоритмов давно уже сравнялась с человеческой. И каждая очередная оптимизация того же распознавания почек повышает эффективность автоматического распознавания уже на считанные проценты, а то и на доли процентов — и это считается хорошим результатом.
Столь высокая эффективность, впрочем, не означает, что блестящие чайные роботы уже сейчас сменят людей на чайных плантациях. Полная автоматизация сбора чая все еще является очень дорогой и требует серьезных инфраструктурных преобразований. Ну и, конечно, распознавание почек — это не единственная задача, которую нужно решать при автоматизации сбора.
Я уже как-то рассказывал недавно, что совершенствование систем распознавания в сочетании с развитием манипуляторов делает роботов, имитирующих ручной сбор чая, одним из наиболее очевидных направлений развития автоматизации этого процесса. Конкурировать с косилками разной степени избирательности такие роботы пока не могут по причине уже упомянутой дороговизны и неготовности инфраструктуры. Да и вообще нельзя исключать, что манипуляторы — это тупиковое направление чайно-сборочной автоматизации. Но пока манипуляторы активно развиваются.
Одной из задач, которые необходимо решить для того, чтобы роботы могли нормально собирать чай, является задача оптимизации движений механической руки, собирающей чай. Ну потому что после того, как анализатор определил на определенном участке чайной плантации пригодные для сбора чайные почки или листья, все эти точки сбора нужно последовательно обойти манипулятором и обобрать. Учитывая всякие неровности, естественные для чайного куста. Так то манипулятор может и по кратчайшему пути от одной точки сбора к другой ломиться, прямо через куст — но так он и куст повредит, и сам повредится.
Оптимизация маршрута руки-робота для сбора чая — это сокращение времени обработки фиксированного участка чайной плантации и сокращение затрат энергии. Что не только снижает себестоимость сбора чая, но и увеличивает время автономной работы роботов, основным источником питания которых являются аккумуляторы.
Короче говоря, чайные программисты работают не только над распознаванием образов чайных почек по фотографиям с разных ракурсов, но и создают все более и более эффективные алгоритмы движения чайных манипуляторов.
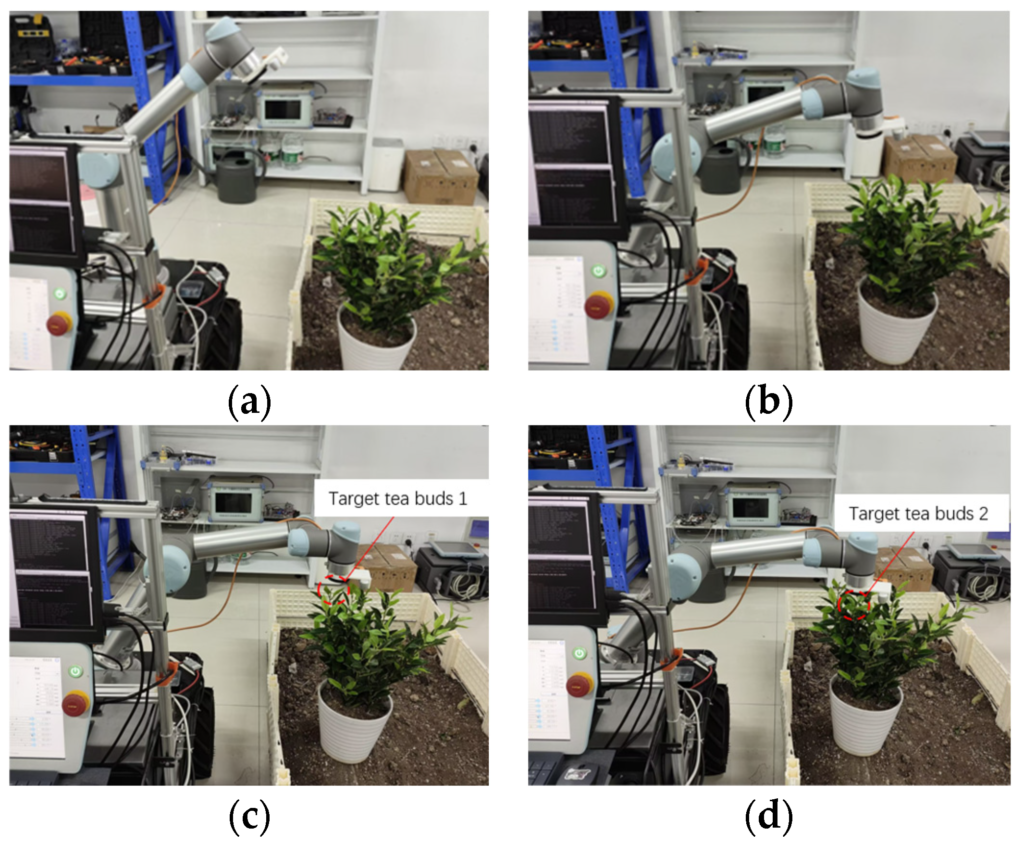
Я уже давно ничего не понимаю в таких алгоритмах, даже программистское прошлое не помогает. Но фотографии из лаборатории, на которых робот смотрит на одинокий чайный куст, в прямом смысле оценивая, как к нему лучше подобраться, мне очень нравятся.
Ежедневные чайные новости в Telegram и в Max.
Добавить комментарий